IoTを支えるセンサー回路の設計方法!センシングの基本知識を解説!

IoTに欠かせないセンシング回路。「センサー → 増幅(アンプ) → フィルタ → A/D変換(ADC) → マイコン処理」の流れで解説します。 サーミスタ/RTD/熱電対/半導体温度センサーの特徴、ノイズを減らすフィルタ設計、A/D変換の標本化・量子化・符号化の基礎、そして温度でファン制御/照度で自動点灯/距離でブザーの3事例まで一気に理解できます。
センシングとは?
センシングとは、温度や光、圧力などの物理的な情報をセンサーで検知し、電気信号として取り出すことです 。
このアナログ信号を増幅して、フィルタによりノイズを除去してからデジタル信号に変換をし、 マイコンで処理や数値計算、加工処理をすることにより、様々な制御が可能になります。これがセンシングの基本動作となります 。
センシングの基本回路について
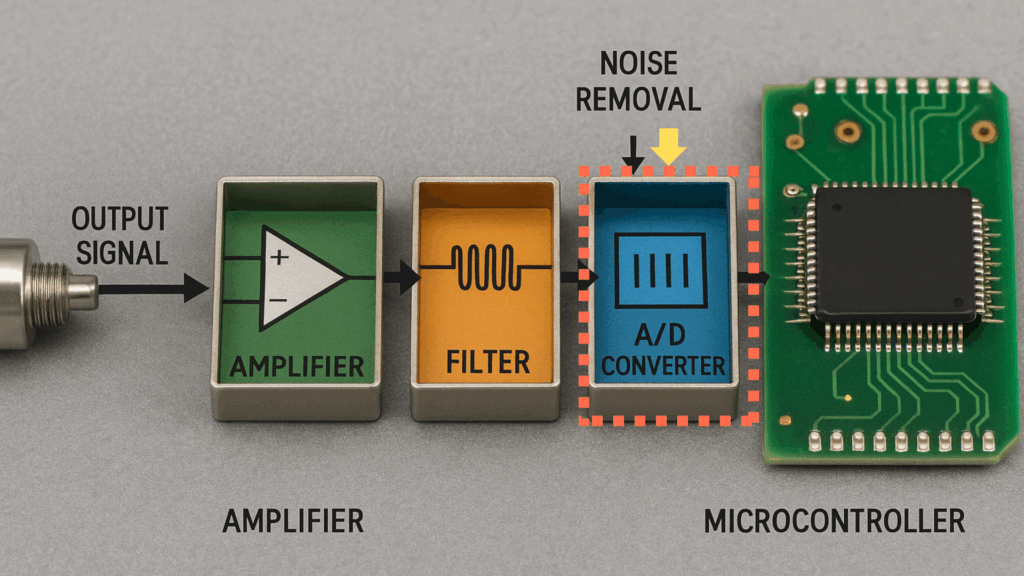
それでは、センシング技術をささえる基本回路について、1つ1つの動作を解説していきます 。
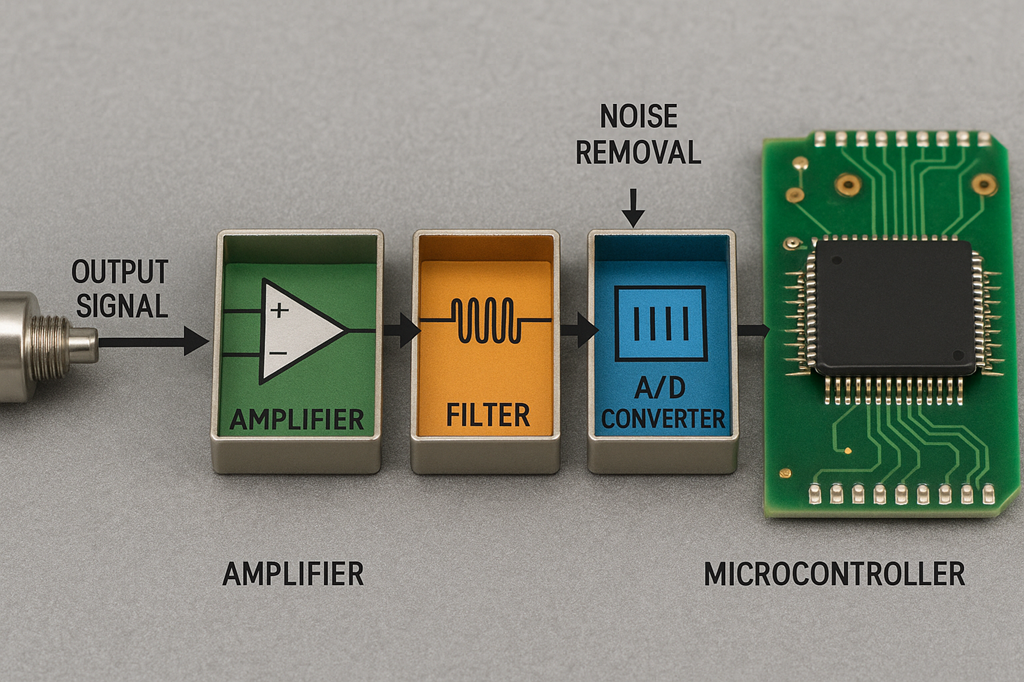
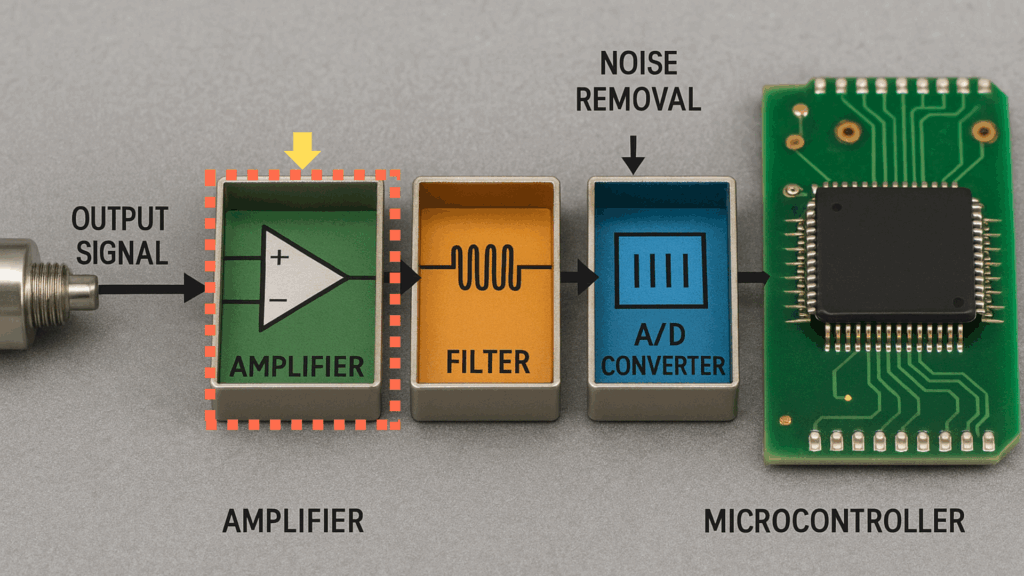
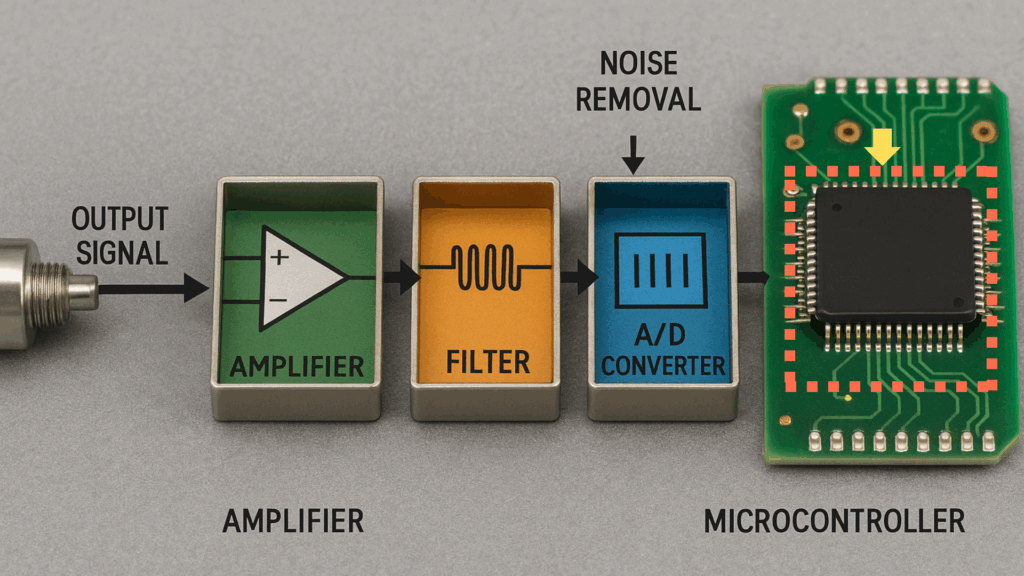
1.OUTPUT SIGNAL:センサーからアナログ信号が出力されます。
2.AMP:センサーのアナログ信号は微小信号であるためアンプ回路で信号を増幅します 。
3.FILTER:微小なセンサー信号にはノイズがのっています。フィルタ回路により余計なノイズを除去します 。
4.A/D CONVERTER:フィルタによりノイズを除去されたアナログ信号をAD変換回路によりデジタル信号に変換します。
5.MICROCONTOROLLER:変換されたデジタル信号をマイコンに取り込みます。そして、センサーの信号を計算、加工などして、目的に応じた処理を行います。
この一連の流れが、センシング回路の基本動作となります。それでは、それぞれの回路の動作を詳しく解説をしていきます。
センサーよりアナログ信号を取出す動作
まず最初の動作は、センサーから電気信号を取りだす動作です。
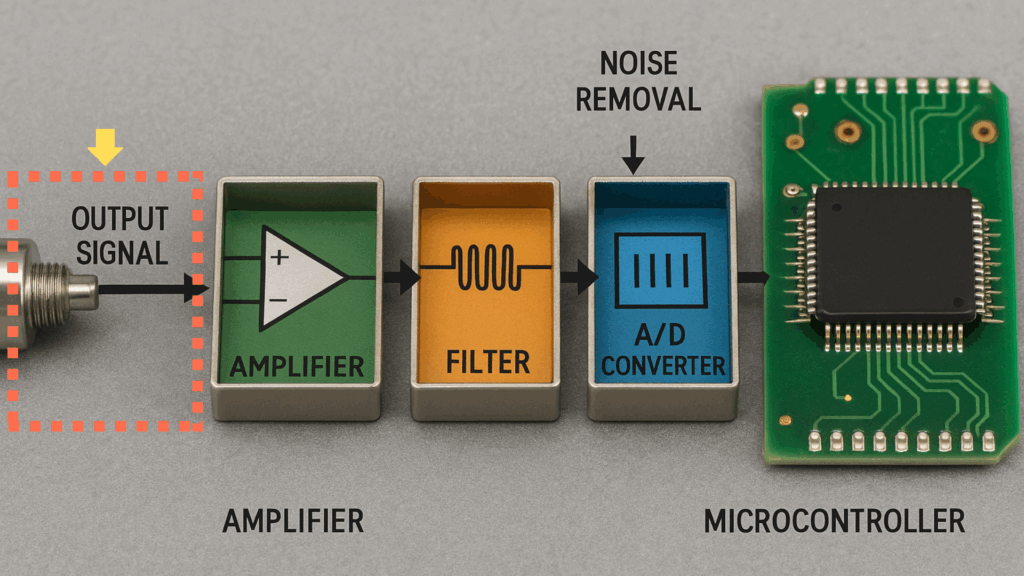
センサーには、温度を検知するセンサーや圧力を検知するセンサー、自動車の自動運転に使用されている対物との距離を検知するセンサーなど、様々なセンサーがあります。
センサーが検知した値を電気信号に変える方法は、センサーにより異なります 。その動作は電圧値、抵抗値などで示します。
例えば、温度センサーであれば、温度により内部の抵抗値が変わります。10度の気温で50ミリボルトの信号が検出できる回路を構成したりします。 では、代表的な温度センサーをご紹介します
サーミスタについて

まず最初にサーミスタについて。その仕組みは、温度によって抵抗値が変わる半導体材料を利用しています。特徴は、小型で低価格、高感度で狭い範囲での精度が高いです。用途は、家庭用電化製品、電池の温度管理などです 。
RTD(抵抗温度検出器)
RTD(抵抗温度検出器)について。その仕組みは、金属の白金の電気抵抗が温度によって直線的に変化します。特徴は、高精度広範囲、安定性が高く、工業用にも適しています。用途は産業機器、医療機器、研究開発などです。
熱電対

熱電対の仕組みは、異なる2種類の金属を接続して温度差から起電力電圧を得ます。特徴は、広い温度範囲でマイナス200から1300度以上で、頑丈で応答性も良好です。用途は、工場設備、炉、エンジン、航空宇宙分野です 。
半導体温度センサー
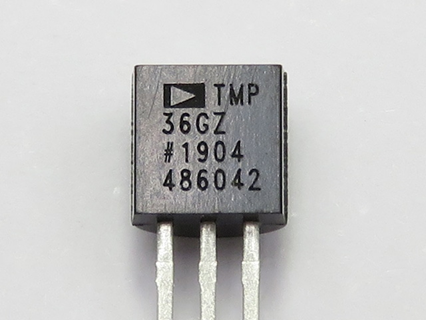
半導体温度センサーについて。その仕組みは、内部のトランジスタの特性変化を利用して温度を電圧に変換します。特徴は、電源さえ供給すればすぐに使える、線形出力で、扱いやすいです。用途は、IoT機器などです 。
センサー信号を増幅する動作
続いて、センシングの2番目の動作は、微小なセンサー信号を増幅する動作です。
多くのセンサー、特に温度や圧力センサーなどは、数ミリボルトや数百ミリボルト程度の非常に小さな電圧しか出力しません。
このままではノイズに埋もれてしまったり、この後の動作であるADコンバータが十分な分解能で読み取れません。このためアンプ回路を用いて、電圧を扱いやすいレベル、例えば、0から5ボルト程度に増幅します 。
それではここで、代表的なアンプ回路についてもご紹介しておきます 。
オペアンプによる非反転増幅回路
まず最初は、オペアンプによる非反転増幅回路です。
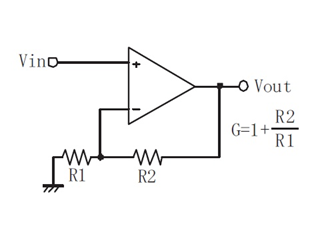
特徴は、入力信号と出力信号が反転せず、増幅率は、1プラスR1分のR2で設計ができます。扱いやすく、基礎回路として広く使われています。
差動アンプによる差動増幅回路
続いては、差動アンプによる差動増幅回路です。
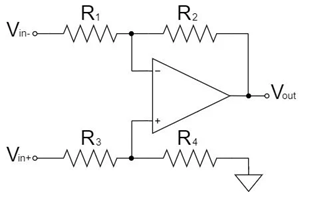
用途は、センサーのプラスとマイナスの差動の出力を扱うときや、共通ノイズを除去したいときにこの回路を使用します。
構成は、オペアンプを使った抵抗4本の回路で、Ⅴin+とⅤin-の差を増幅します。利点は同相ノイズを除去でき、精度が高く、産業用センサーに多用されています。
回路設計のポイントについて。センサーの微小信号は、まず適切なアンプ回路で増幅する必要があります。基本はオペアンプの非反転増幅を使用します 。高精度でノイズ対策が必要な場合は、差動アンプを使うなど、ノイズ対策を意識して回路を設計をしていく必要があります 。
センサー信号のノイズを除去する動作
センシング回路の3つ目の動作は、信号にのっている余計なノイズを除去するです。
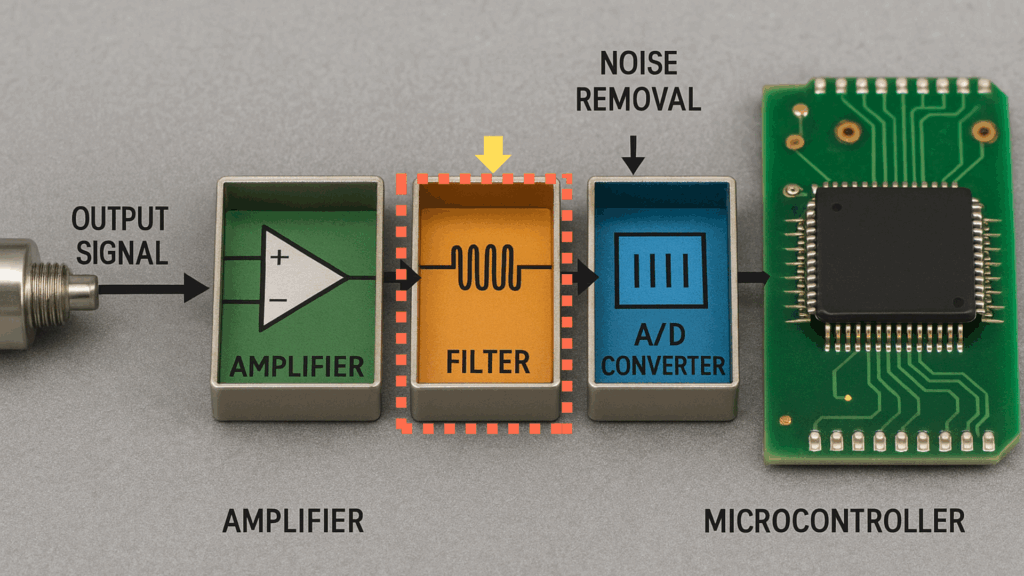
微小なセンサー信号には、電源ノイズや高周波ノイズ、例えばスイッチング電源や無線干渉などのノイズなど、周囲の電子回路からの影響などのノイズがのりやすいです 。
これらのノイズをそのまま増幅してAD変換すると、測定値が不安定になったり、誤差が増大します。このため、フィルタ回路を使用してこれらのノイズを除去します 。
フィルタ回路には、ローパスフィルタ、ハイパスフィルタ、バンドパスフィル、バンドストップフィルタなどがあります。それでは各フィルタについて説明します。
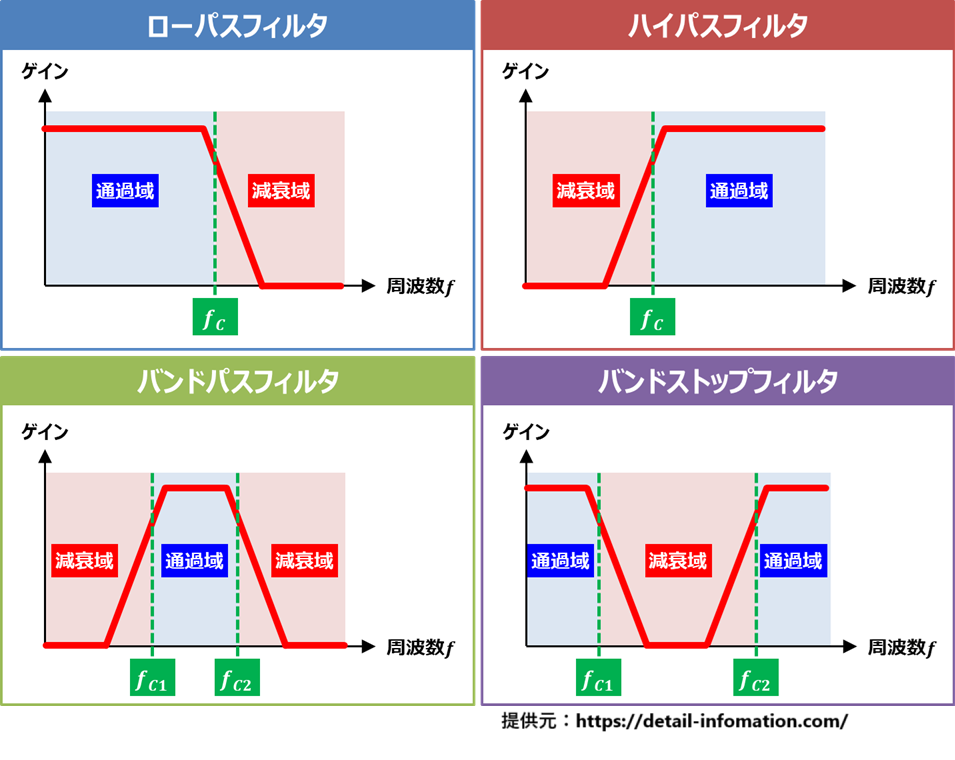
ローパスフィルタ:設定した周波数より低い周波数の信号を通過させ、高い周波数の信号を減衰させます 。
ハイパスフィルタ:設定した周波数より高い周波数の信号を通過させ、低い周波数の信号を減衰させます
バンドパスフィルタ:設定した周波数の信号だけを通過させ、それ以外の周波数の信号を減衰させます
バンドストップフィルタ:設定した周波数の信号だけを減衰させ、それ以外の周波数の信号を通過させます。
ここでは、代表的なローパスフィルタについて説明します。
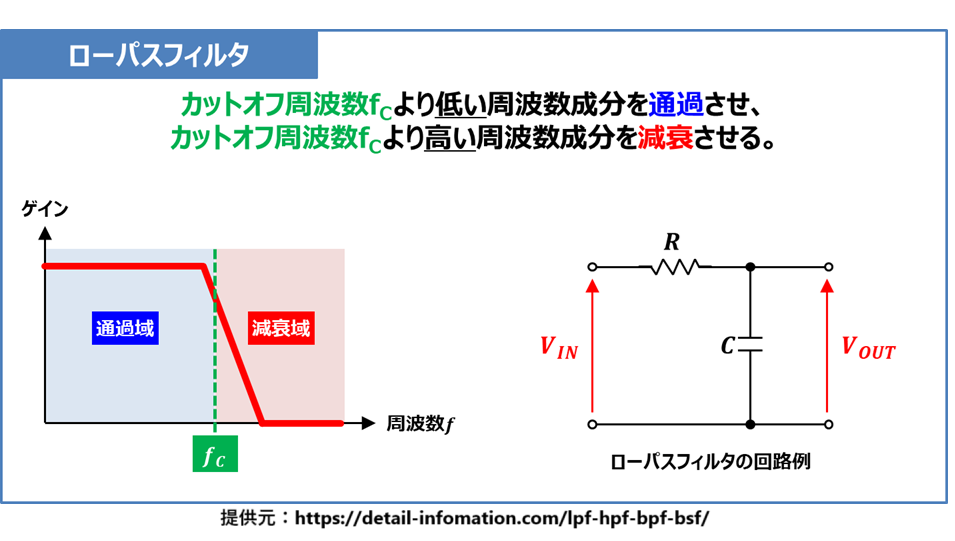
ローパスフィルタは、カットオフ周波数であるfCより低い周波数成分を通過させ、高い周波数成分を減衰させる回路です。カットオフ周波数は2πRC分の1で算出することができます。
カットオフ周波数を除去したいノイズの周波数に設定するなどして、回路を設計していきます。この回路により、センサー信号にのっているノイズを除去します。
アナログ信号をデジタル信号に変換(A/D変換)
センシング回路の4つ目の動作は、アナログ信号をデジタル信号に変換です。
アナログ信号を、一定の時間間隔と電圧ステップに分けて数値化して処理する回路のことです。これにより、センサーの電圧信号がバイナリデータ、たとえば8ビットで256段階で読み取れるようになります 。ここでは、AD変換の手順について、わかりやすく説明します。
A/D変換の基本(標本化・量子化・符号化)
アナログ信号をディジタル信号に変換するには、標本化、量子化、符号化の3つの手順が必要です 。
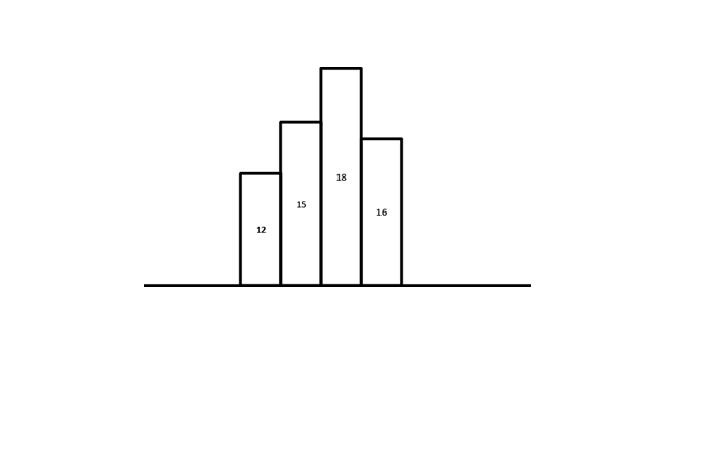
標本化は、アナログ信号を一定時間ごとに区切り、その値を読み込むことでサンプリングとも呼びます。
量子化は、標本化し読み込んだ値をディジタル信号に変換できるように加工することです。量子化による誤差を量子化誤差と呼びます。
符号化は、量子化された値を指定された2進数の桁数で表現することです。この2進数の桁数を分解能と呼びます。
では、それぞれの動作を絵図を用いて解説をしていきます では、
標本化について
最初の工程である標本化について解説します
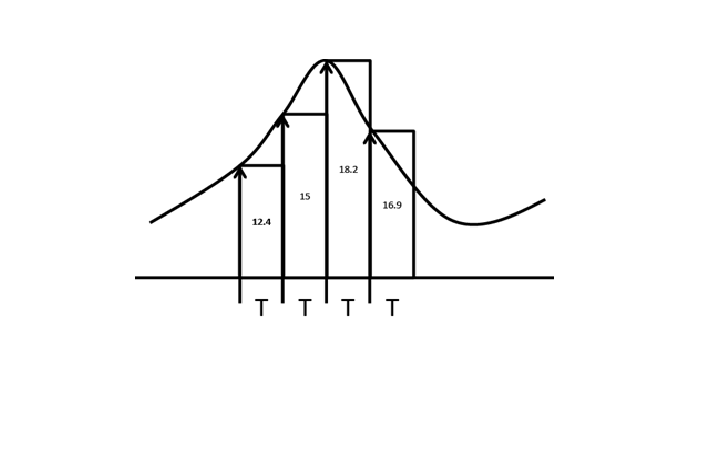
標本化はアナログ信号を一定時間ごとに区切ります。この場合ではT時間ごとに区切り、その値を読み込むことです。
このときの一定時間を刻む信号をサンプリング周波数またはサンプリングクロックなどと呼び、標本化そのものをサンプリングと呼ぶ場合もあります。
また、サンプリング間隔が短ければアナログ信号をより細かくディジタルデータに変換できることになります 。
量子化について
続いて量子化についてです。
量子化は、標本化し読み込んだ値をディジタル信号に変換できるように加工することです。
標本化された値をディジタル信号で表現できるように小数点以下を切り捨てているため、標本化された値と量子化された値には差が生じます。これを量子化誤差といいます 。
この誤差が大きいとディジタル信号の信頼性が失われます。量子化誤差は、次の符号化と大きな関係があります 。
符号化について
最後は符号化についてです。
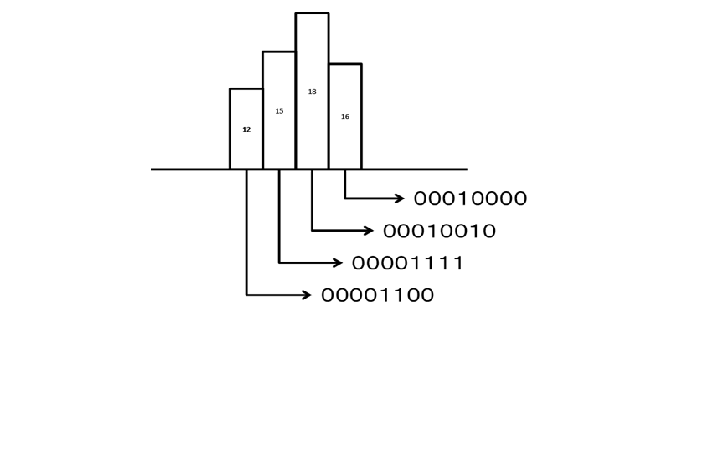
符号化は、量子化された値を指定された2進数の桁数で表現することで、この2進数の桁数を分解能と呼びます 。
ビット数が多ければより細かな値を表現できることになります。たとえば、ビット数が2ビットの場合、表現できるのは、0、1、2、3の4種類です、。つまり、入力されたアナログ信号は、4等分されたいずれかの値でしか表現できないことになります。
分解能が3ビットの場合、8種類で表現できるので2ビットに比べてより細かな値を表現できます。サンプリングクロックが高速で、分解能のビット数が大きければ、センサー信号のアナログ信号を、より細かくデジタル信号に変換することができます。このため、センサーの用途に応じて、最適なAD変換器を使用する必要があります 。
デジタル信号をマイコンにより処理する動作
センシング回路の最後5番目の動作は、デジタル信号をマイコンにより処理する動作です。
マイコンでは、様々なセンサーからのデジタル信号を様々な機能を実現するための処理や計算を行います。 C言語などで、これら処理や計算をするプログラムを作成し、マイコンへ実装することでマイコンは機能を実現する動作が可能となります 。
ここでは、マイコンが処理するセンシングの事例を3つご紹介します。
温度監視とファン制御
一つ目は、温度監視とファン制御です。
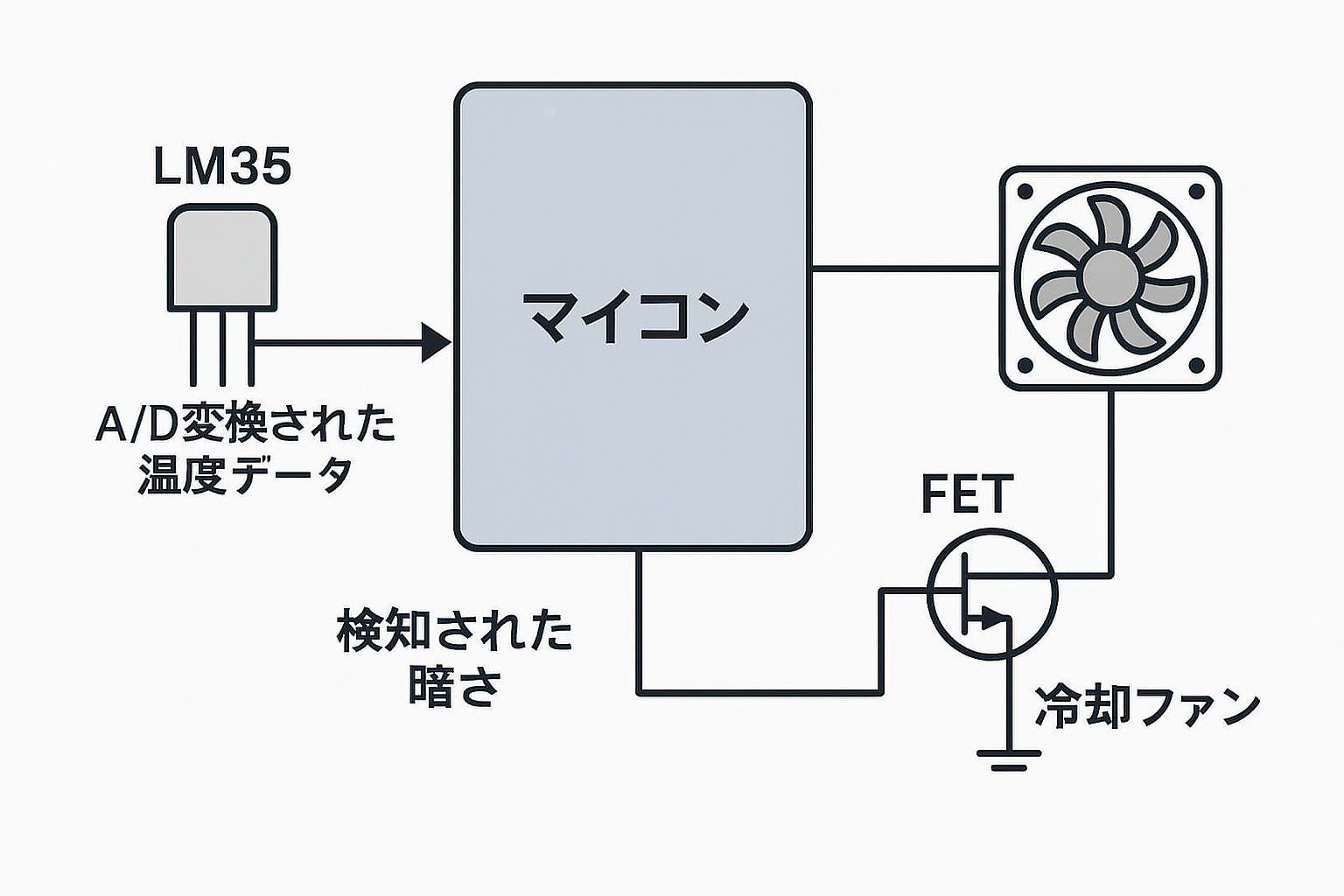
AD変換した温度データが設定温度を超えたら、FETを介して冷却ファンを動作させます。他の使用例としては、パソコンのファン制御や産業機器の熱管理制御などもあります。
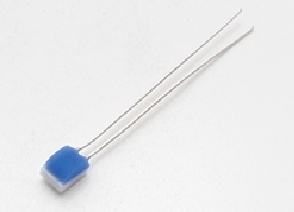
照度センサーで自動ライト調整する動作
二つ目は、照度センサーで自動ライト調整する動作です
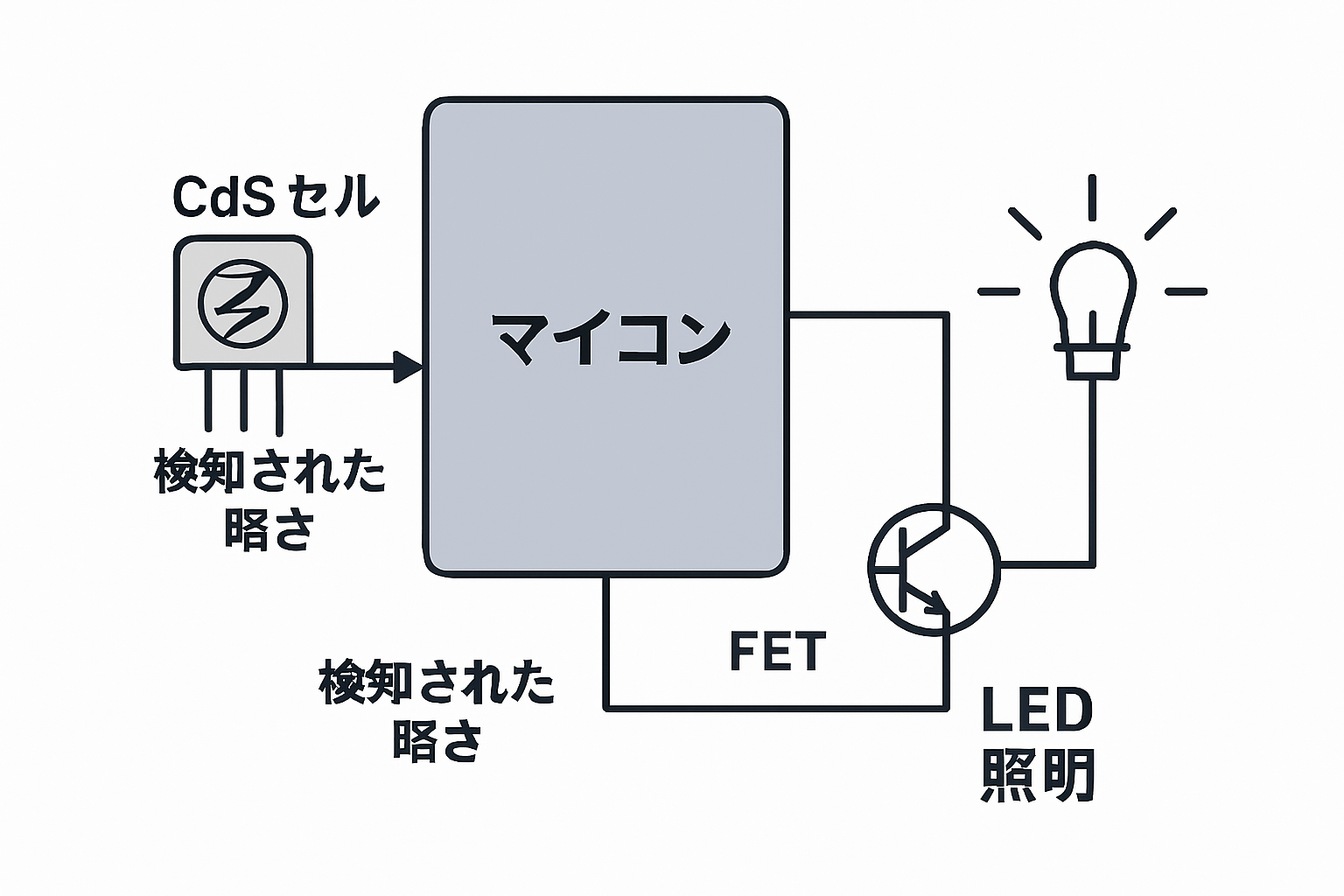
CdSセルのセンサーの信号によりマイコン周囲が暗くなったことを検知します。そして、LED照明を自動点灯させます。他の使用例としては街灯の自動オンオフ点灯や車のオートライトの制御などがあります
距離検出とアラーム制御
3つ目は、距離検出とアラーム制御です。
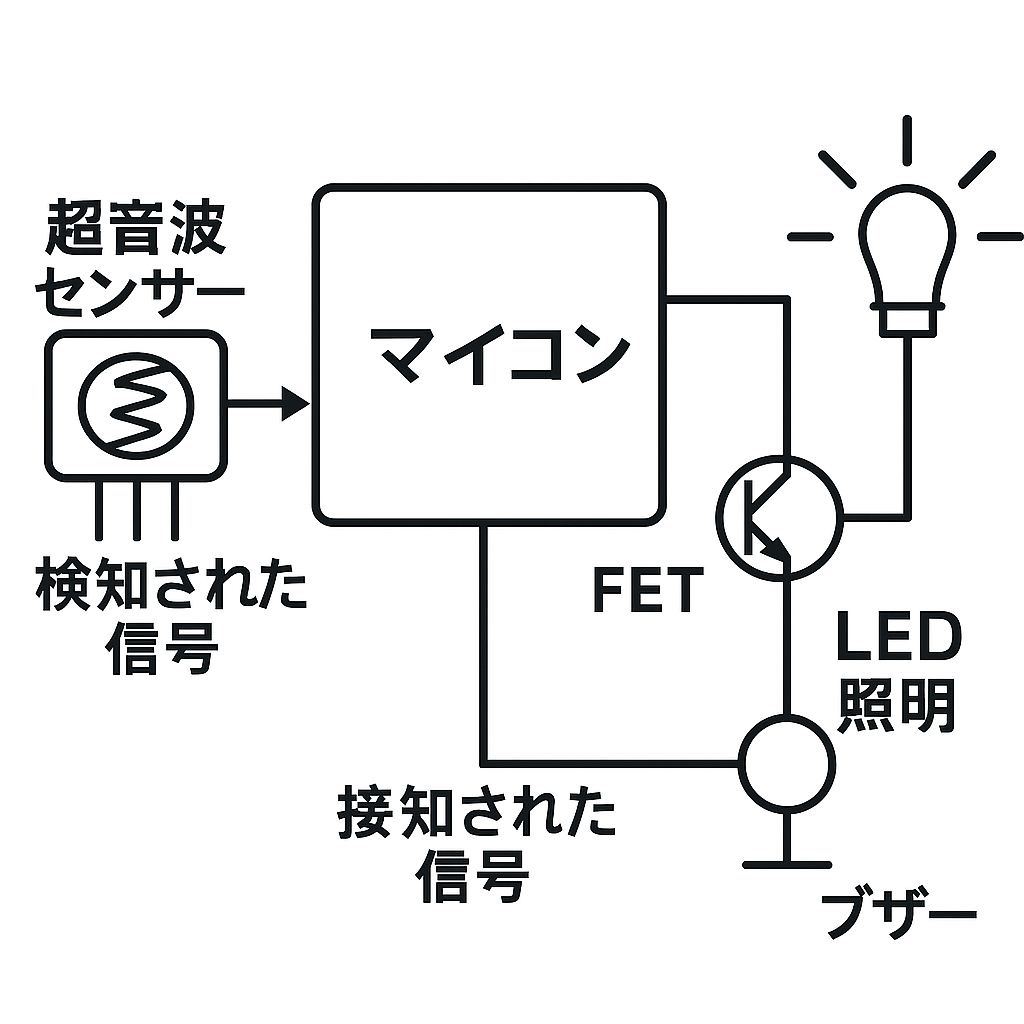
超音波センサーによりマイコンが一定距離内に物体が近づいたら、ブザーやLEDを点灯します。他の使用例としては、障害物検知や自動ドア制御、防犯装置などに応用されています。
まとめ
IoTの本質は、現実世界の状態、温度や湿度、人の動き、圧力などをデータ化し、ネットワークを通じて送受信、分析、制御することです 。この最前線で活躍するのがセンシング技術です。そして、それを実現するためには、ここでご紹介した基本回路の知識が必要となります。
【関連動画】

【本記事の動画版】
-
前の記事

インバーターって何?仕組み・特徴・用途を解説!
-
次の記事
インピーダンスと抵抗の違いって何?